(Feb - Jun 2015)
The main objective of this project was about the design, modeling, simulation, fabrication and control of a mobile robot for exploring inside environment.
Teammates: Pedro Nel Acero Brochero, Juan José Martínez Moritz, Jose Libardo Navia Vela.
Images
1 / 7
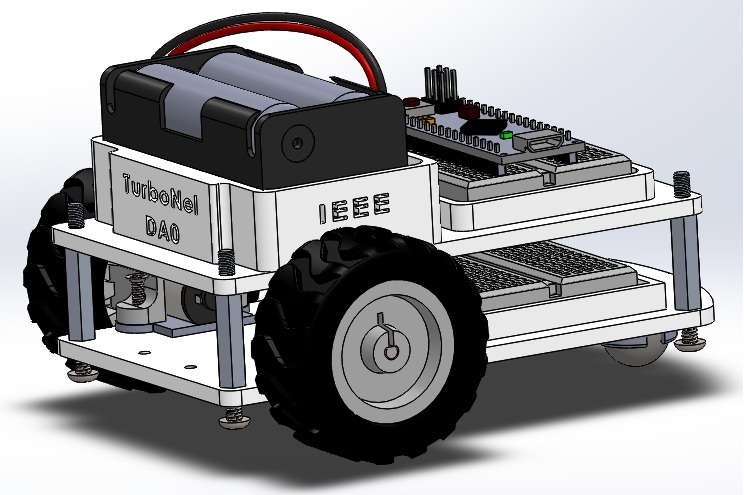
3D Model (First perspective)
2 / 7
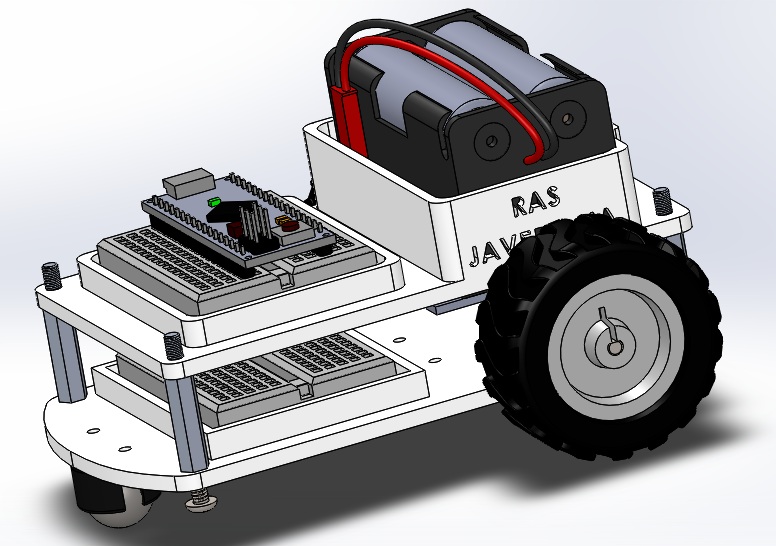
3D Model (Second perspective)
3 / 7
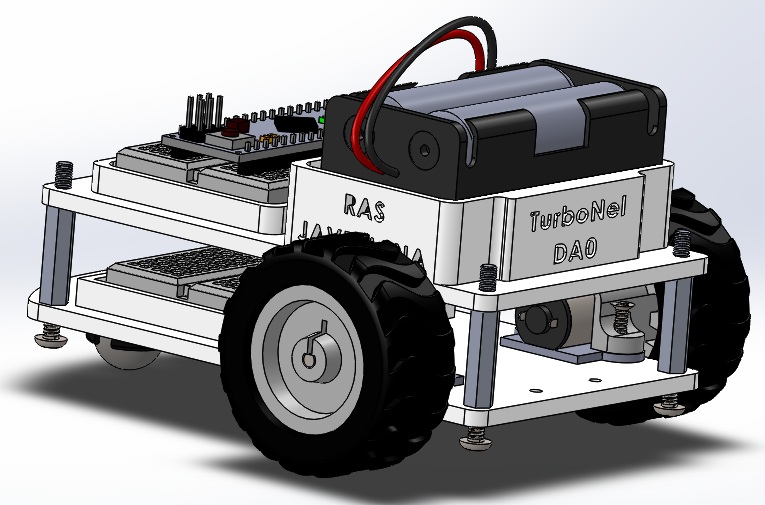
3D Model (Third perspective)
4 / 7
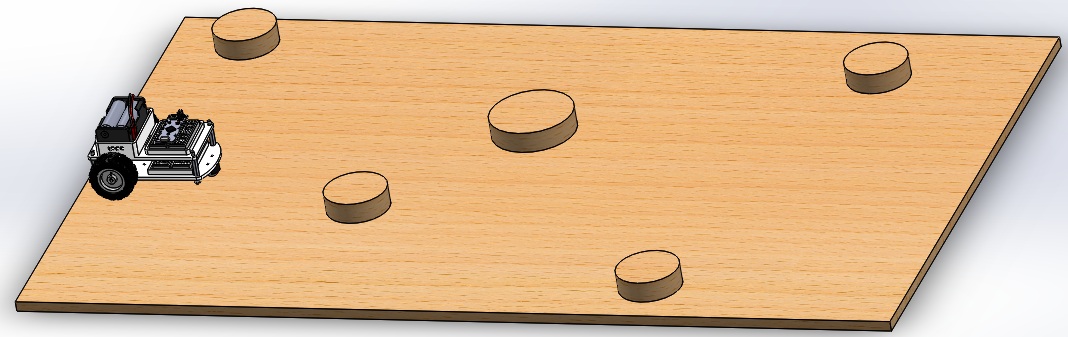
3D model of the mobile robot on an environment with obstacles
5 / 7
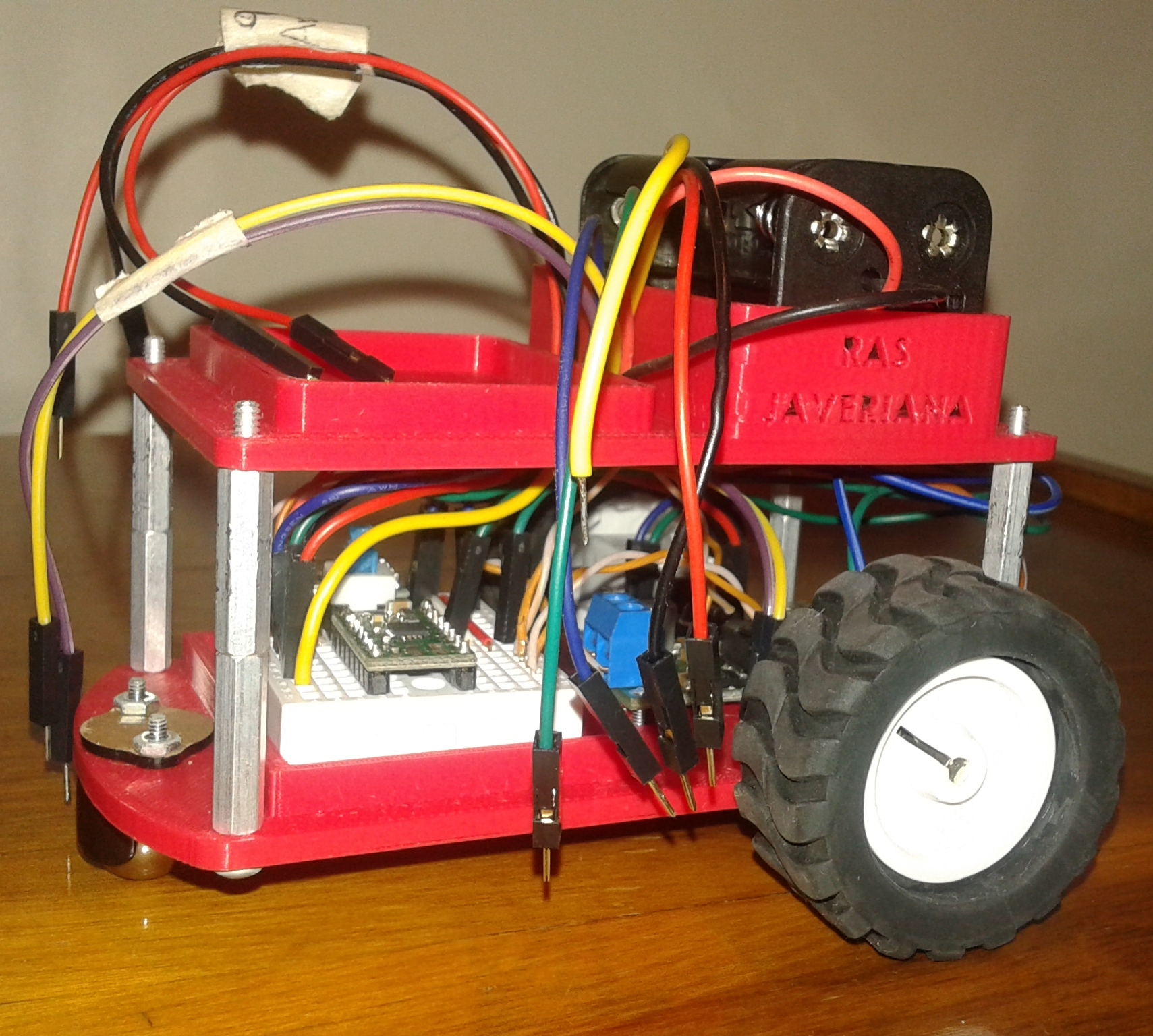
Mobile Robot (First perspective)
6 / 7
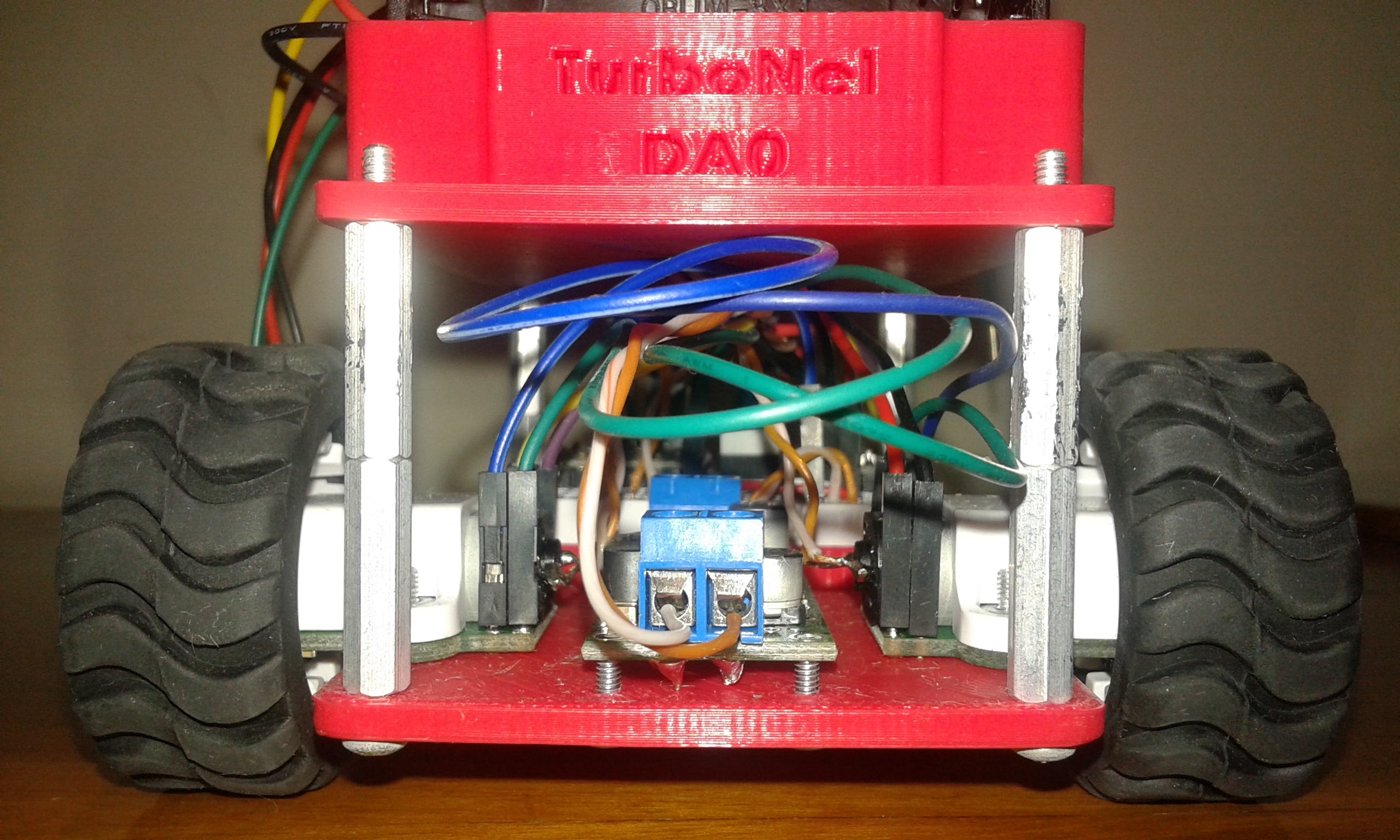
Mobile Robot (Second perspective)
7 / 7
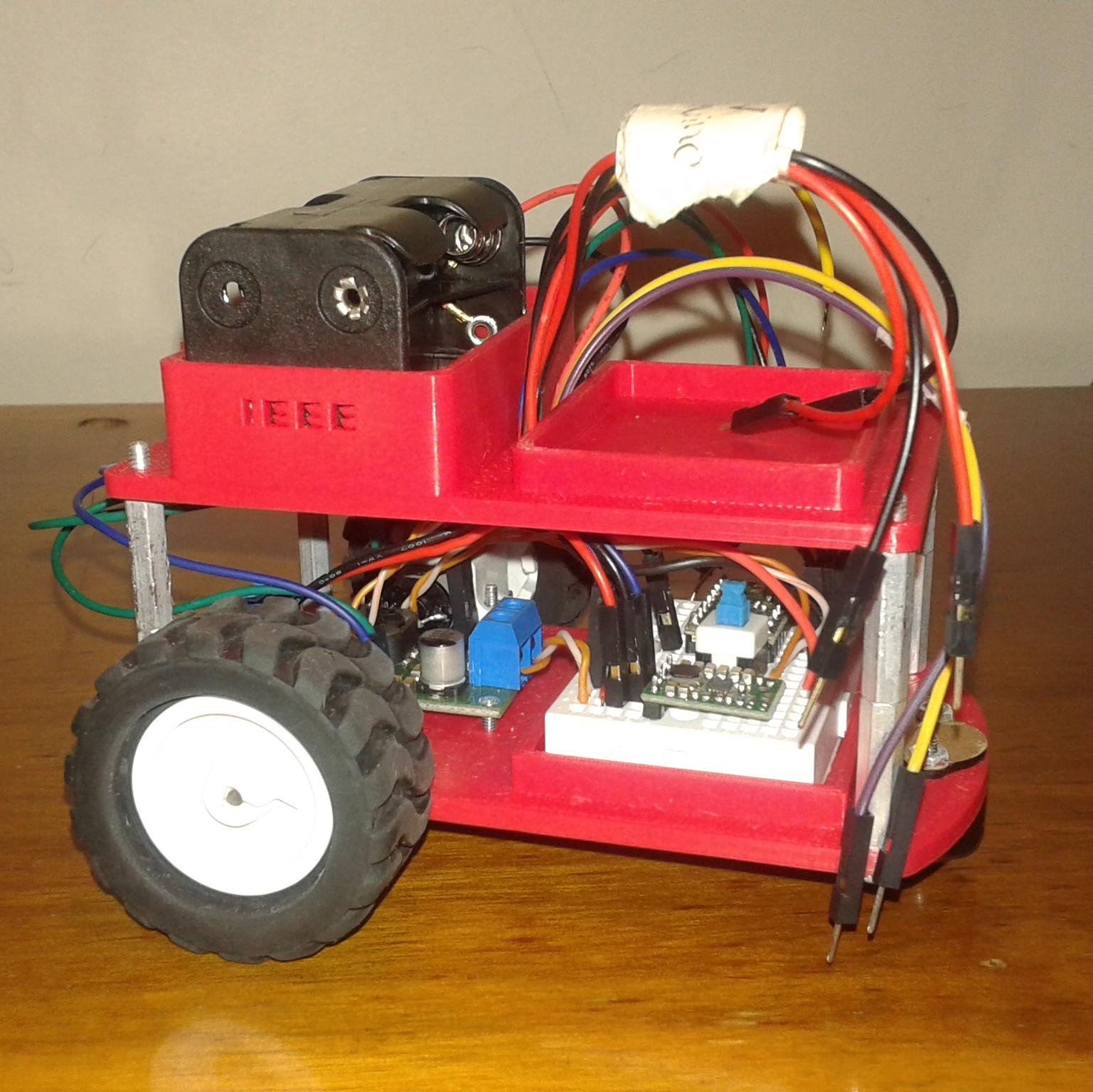
Mobile Robot (Third perspective)
This video shows the operation of this project.